 ▲ 모래 속을 파고들어 물체를 인식하는 로봇 핑거(사진=MIT) 모래, 흙, 쌀 등 작은 입자들 속에 물체가 숨어 있다면 사람은 손을 넣어 물체의 형태와 종류를 파악할 수 있다. 군인이나 경찰은 땅속에 묻혀있는 지뢰나 폭발물을 탐침기를 이용해 찾아낼 수 있다. 지금까지 개발된 로봇팔이나 로봇 핸드는 외부에 드러난 물체를 비전 시스템을 이용해 확인할 수 있지만 모래나 쌀처럼 작은 입자들 속에 숨어 있는 물체를 인식하는 것은 불가능하다. 지하투과레이더 등 기술을 이용해 땅속에 있는 물체를 인식하는 게 가능하지만 아직은 선명도가 떨어진다. 'MIT 뉴스'에 따르면 MIT 컴퓨터과학·인공지능연구소(CSAIL)는 모래, 쌀, 자갈, 흙 등 다양한 종류의 입자 속에 숨어 있는 물체를 인식할 수 있는 촉각센서 기반 로봇 손가락인 ‘디거 핑거(Digger Finger)’를 개발했다. 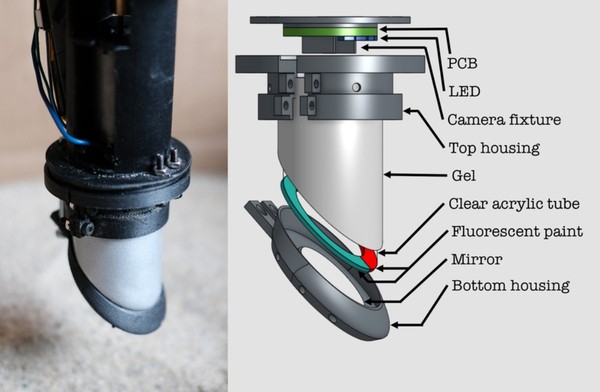
▲ 디거 핑거의 구성(사진=MIT) 디거 핑거는 기존의 촉각센싱 기술인 ‘겔사이트(GelSight)’를 활용하고 있다. 일반적으로 겔사이트 센서는 빛에 반사하는 멤브레인으로 덮인 겔(gel)로 이뤄져 있다. 멤브레인의 뒷 부분에는 3개의 LED와 카메라가 있다. 물체에 겔사이트를 가져가면 빛이 겔과 멤브레인을 통과하면서 물체의 형상에 따라 멤브레인의 형태가 변화한다. 빛이 겔과 멤브레인을 통과하면 카메라를 통해 멤브레인의 패턴 변화를 수집하고, 컴퓨터 비전 알고리즘을 통해 물체의 3D 형상을 추출해낼 수 있다. 이번에 개발된 디거 핑거는 겔사이트 센서를 두가지 방식으로 슬림화했다. 첫번째는 원통형의 핑거 끝부분을 경사지게 만들었다. 모래나 쌀 등 입자들 속을 쉽게 파고들 수 있도록 끝부분이 날카롭고 경사면의 구조를 갖고 있다. 겔사이트의 형태를 바꾼 것이다. 두번째는 청색 LED와 컬러 형광의 결합을 통해 LED 빛의 3분의 2를 버렸다. 이를 통해 촉각센서의 복잡성과 형태를 단순화했다는 설명이다. 모래나 쌀 등 입자 구조의 물체들이 한 곳에 뭉쳐 있으면 단단하게 굳어지는 현상이 발생한다. 입자들이 단단하게 뭉치면 촉각센서가 파고들 수 없다. 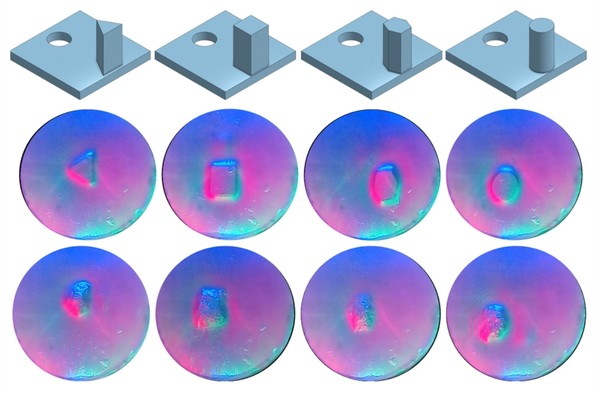
▲ 디거 핑거를 통해 3D 프린터로 제작한 물체를 인식한 이미지. 중간 이미지 데이터는 디거 핑거가 물체를 직접 접촉해 인식한 경우이고, 제일 아래 이미지는 디거 핑거가 모래 속에 숨어 있는 물체를 인식한 이미지 데이터다.(사진=MIT) 연구팀은 이런 문제를 해결하기 위해 진동모터를 사용해 뭉친 입자들을 ‘유동화(fluidize)’하는 방식을 고안했다. 디거 핑거는 입자 속에 들어있는 물체를 확인하면 보다 정확하게 물체를 인식하기 위해 핑거를 비꼬는 과정을 거친다. 연구팀은 이번 기술이 상용화 단계에 접어들면 지뢰 탐지 로봇, 미세 수술용 로봇 등에 활용할 수 있을 것으로 기대하고 있다. 연구팀은 도요타 미국 연구법인인 TRI, 미 해군연구소, 노르웨이연구위원회 등의 지원을 받아 이번 연구를 수행했다. |




